|
I am an Assistant Professor in the Department of Computer Science at Purdue University. Before that, I was Postdoctoral Fellow at the University of Toronto working with Prof. Kyros Kutulakos. I obtained my PhD from UCL under the supervision of Prof. Christos Bergeles. Email / X / Google Scholar / Teaching |

|
|
I'm interested in computer vision, computational photography and neural fields. My current research revolves around photon cameras, a cutting-edge technology capable of detecting the tiniest unit of light - the photon. I'm excited about coming up with new ways to process signals from photon cameras, so we can see the world in never-before-seen ways. Prospective students: I am actively looking for motivated and talented students! If you are interested in joining my group, please read this. |
|
|
|

|
Sotiris Nousias*, Mian Wei*, Howard Xiao, Maxx Wu, Shahmeer Athar, Kevin J. Wang, Anagh Malik, David A. Barmherzig, David B. Lindell, Kiriakos N. Kutulakos * Joint first authors. CVPR 2025, Oral project page We propose a passive single‑photon method that opportunistically recovers time‑of‑flight from ambient pulsed light sources. |
|
Mian Wei*, Sotiris Nousias*, Rahul Gulve , David B. Lindell, Kiriakos N. Kutulakos * Joint first authors. ICCV 2023, Marr Prize (best paper award) project page We introduce a novel theory and method that passively captures a dynamic scene once and allows re-rendering of video across 9+ orders of magnitude in time. |
|
Anagh Malik, Parsa Mirdehghan, Sotiris Nousias, Kiriakos N. Kutulakos, David B. Lindell NeurIPS 2023, Spotlight project page / video / arXiv We introduce a method to do novel view lidar synthesis, allowing sparse view scene reconstruction. |
|
Zisos Mitros, S.M.Hadi Sadati, Sotiris Nousias, Lyndon Da Cruz, Christos Bergeles ICRA 2022 Novel design and modelling of continuum robots for robotic surgery. |
|
Sotirios D. Nousias University College London, 2021 PhD Thesis Examiners: Prof. Andrew Davison, Dr Fransisco Vasconcelos |
|
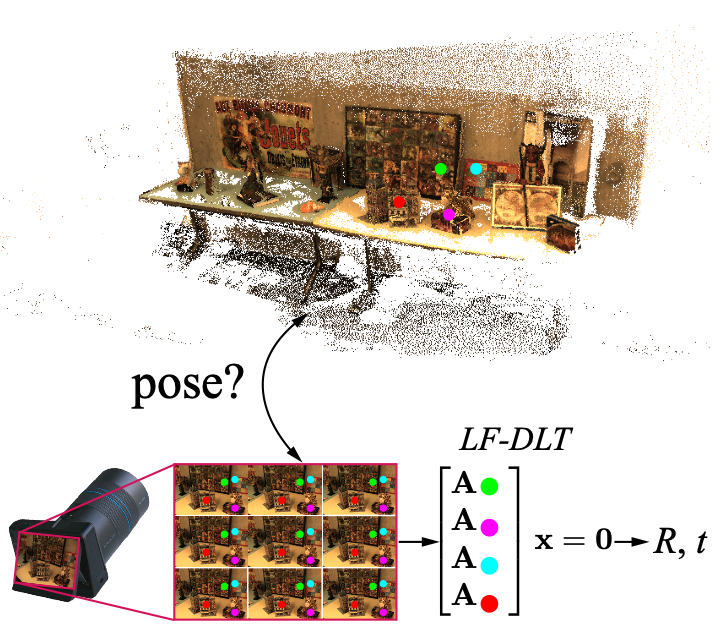
Sotiris Nousias, Manolis Lourakis, Pearse Keane, Sebastien Ourselin, Christos Bergeles 3DV 2020 Absolute pose estimation for light fields using 4 correspondences. |
|
|
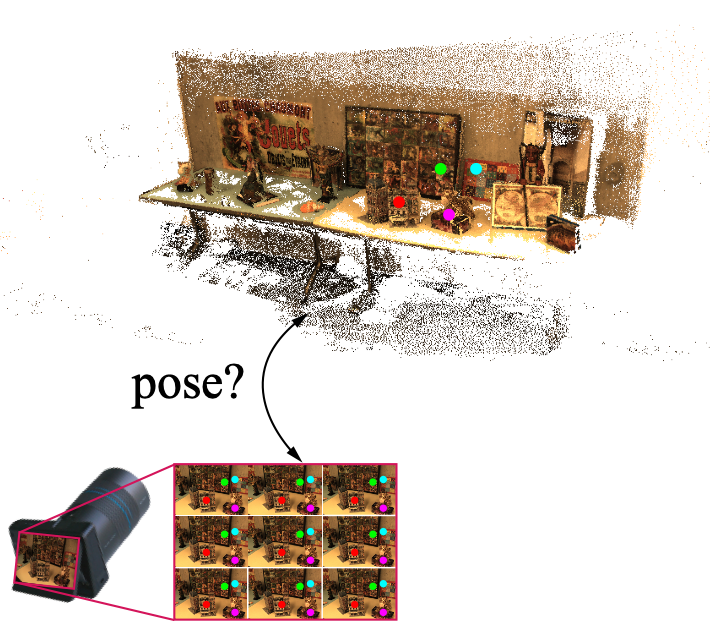
Sotiris Nousias, Manolis Lourakis, Christos Bergeles CVPR 2019 video Large scale structure from motion framework for metric 3D reconstruction using light fields. |
|
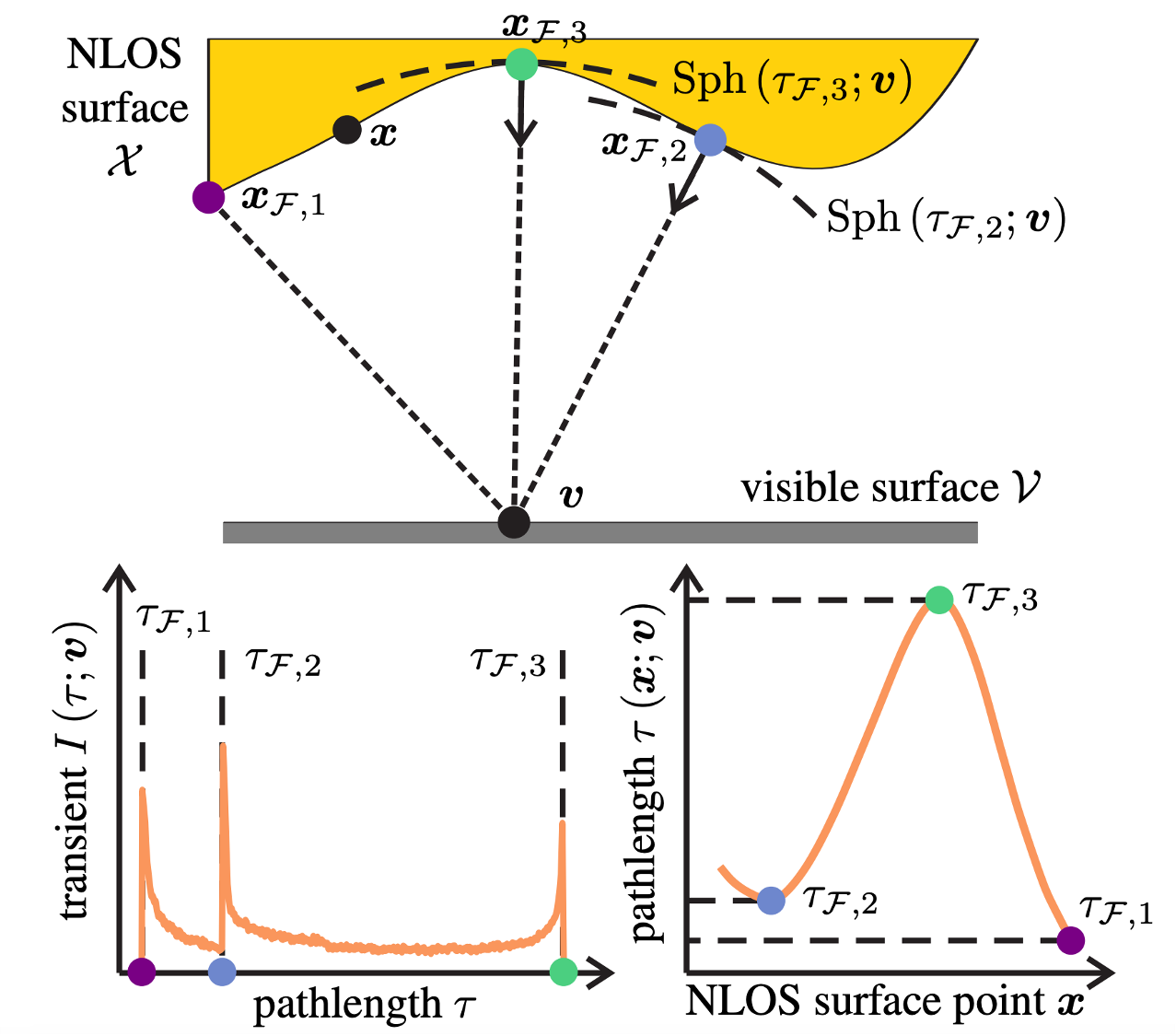
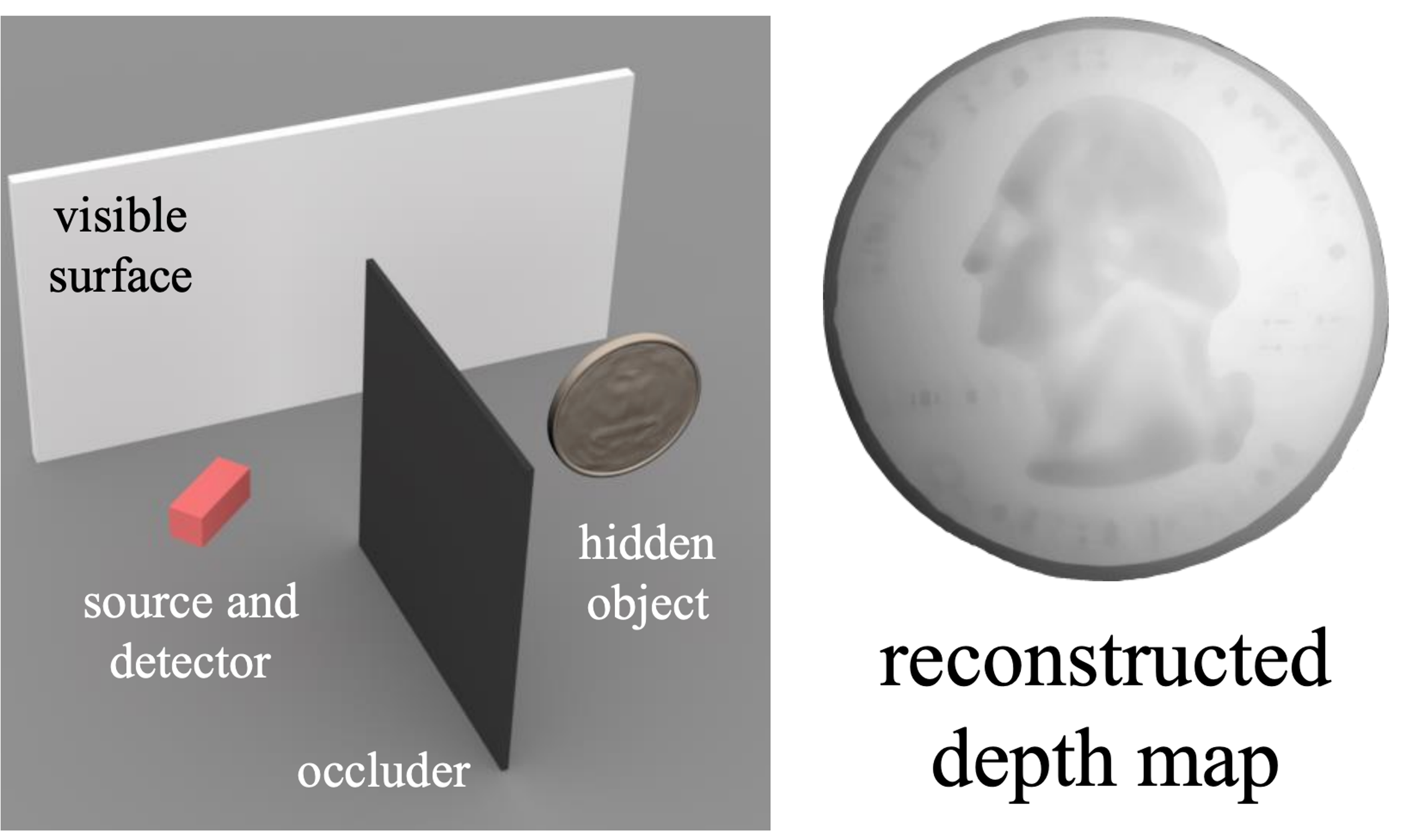
Shumian Xin, Sotiris Nousias, Kyriakos N. Kutulakos, Aswin C. Sankaranarayanan, Srinivasa G. Narasimhan, Ioannis Gkioulekas CVPR 2019, Best Paper Award project page NLOS shape reconstruction. |
 
|
Jonas Pichat, Juan Eugenio Iglesias, Sotiris Nousias , Tarek Yousry, Sebastien Ourselin, Marc Modat ICCV Workshops 2017 Registration of different modalities in medical images using level-lines. |
 
|
Sotiris Nousias, Francois Chadebecq, Jonas Pichat, Pearse Keane, Sebastien Ourselin, Christos Bergeles ICCV 2017 code / supplementary Calibration of plenoptic cameras using checkerboards. |
 
|
Sotiris Nousias, Evangelos Papadopoulos Med. Conf. on Control and Automation 2016 Estimation of a quadruped's roll and pitch using an IMU and leg kinematics. |
|
I stole this template from Jon Barron. |